




kebşirleýji robot senagat robot goly
Spesifikasiýa
Model: NKRT61506B
Naprýa .eniýe: 380V
Loadük ýüklemesi: 6KG
Marag aralygy: 1551mm
Programma: kebşirlemek (MIG / MAG / TIG) we başgalar
Ok: 6
Iň köp ýük göterijisi: 6kg
Gaýtalanýan ýeri: ± 0.05mm
Kuwwatlylygy: 2,5kw
Ulanyş gurşawy: 0 ℃ -45 ℃
Gurnama: ýer / gapdal diwar
Iş aralygy:
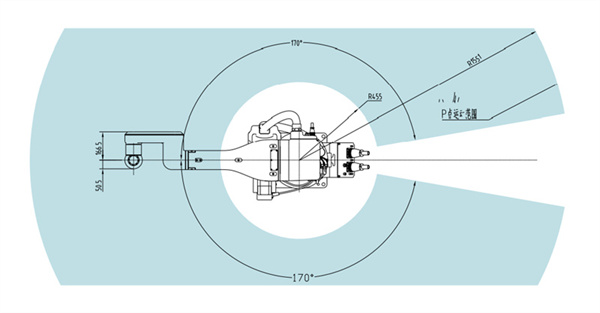
J1: ± 170 °
J2: -70 ° + 170 °
J3: -85 ° ~ + 90 °
J4: ± 360 °
J5: ± 360 °
J6: ± 360 °
Iň ýokary tizlik:
J1: 138 ° / s
J2: 138 ° / s
J3: 223 ° / s
J4: 270 ° / s
J5: 337 ° / s
J6: 1070 ° / s
Iş aralygy
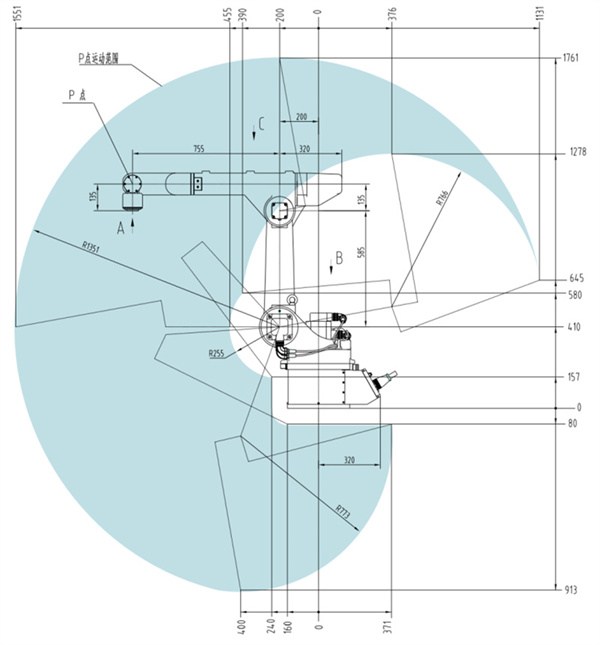
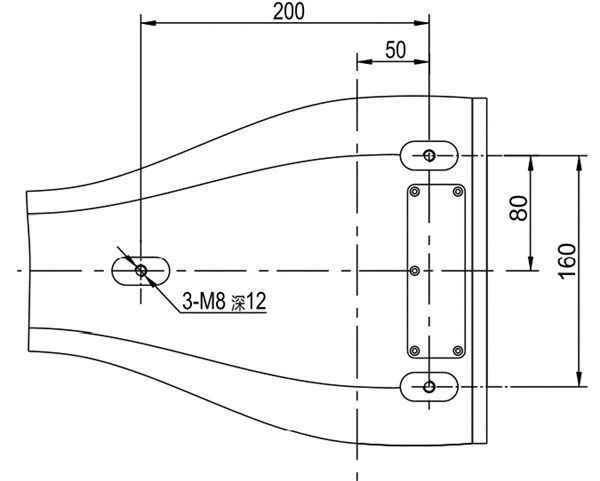
“B-dir” esasy gurnama:
C-dir lehimleme makahin gurnama:
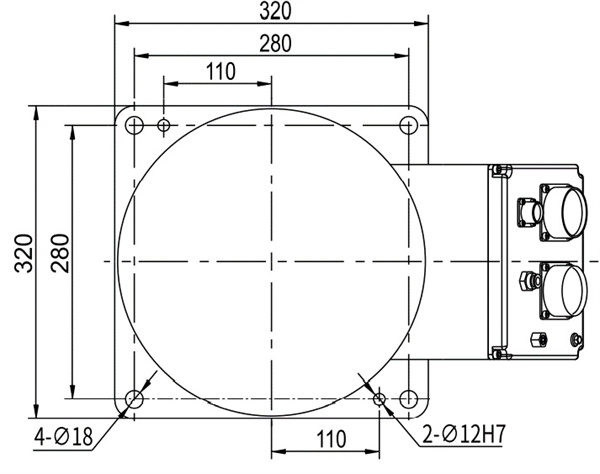
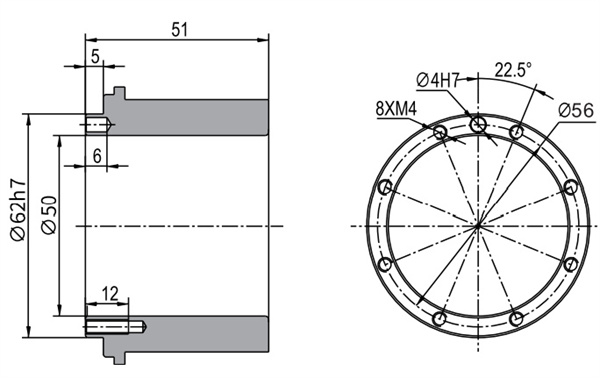
A-dir gutarýan flanes ululygy:
Önüm aýratynlyklary
Goluň aralygy 1,5 metr. Örän ykjam dizaýn, poly ýa-da ters gurnamany saýlamak üçin çeýeligi hödürleýär. Uly iş meýdany, çalt işleýiş tizligi we ýokary gaýtalanma, kebşirlemek üçin amatly we köp sanly amaly bar.
Reduker, robot üçin iň möhüm bölek, NEWker-CNC RV we garmoniki reduktor üçin Hytaýyň meşhur “LeadDrive” markasyny ulanýar, sebäbi robot gözegçisi biziň öz dizaýnymyz, robot giň meýdana laýyk gelýär, şeýle hem ABB, Kuka, Kawasaki, Fanuc we ş.m. gurluş gurluş robotlaryna gözegçilik edip bilýär.
NEWker-CNC 2-den 24 oka çenli, 4kg-dan 160 kg-a çenli robot goly, öwretmek funksiýasy, G kody, awtonom programma, gözleg funksiýasy, görüş funksiýasy, yzarlamak funksiýasy we ş.m., kebşirlemek, palletirlemek, ýüklemek we düşürmek, işlemek, ýalpyldawuk we ş.m. ýaly, dünýäde hyzmat etmek üçin amaly we ideal robot önümlerini öndürmek ýaly ugurlarda başarnykly bolmaly.
NEWKer robot gol öndürýär we kebşirlemekde, kesmekde, palletirlemekde we işlemekde dolandyryş giňden ulanylýar.
Bulardan başga-da, inkjet, kofe ýasamak, oýmak, ýazmak we ş.m. zähmetiň ähli ýerlerini çalyşýan dürli şahsylaşdyrylan programmalary hem berip bileris.
Awtoulag, harby, gurluşyk, oba hojalygy, howa we beýleki ugurlarda dürli zerurlyklar üçin dürli enjamlary üpjün ediň.
NEWker amallary hem ýönekeý we ulanmak aňsat.
“NEWker” Hytaýda goşa kanal sürüjisi alan we dünýäde G kodlaryny robot goly bilen ulanan ilkinji öndüriji.









