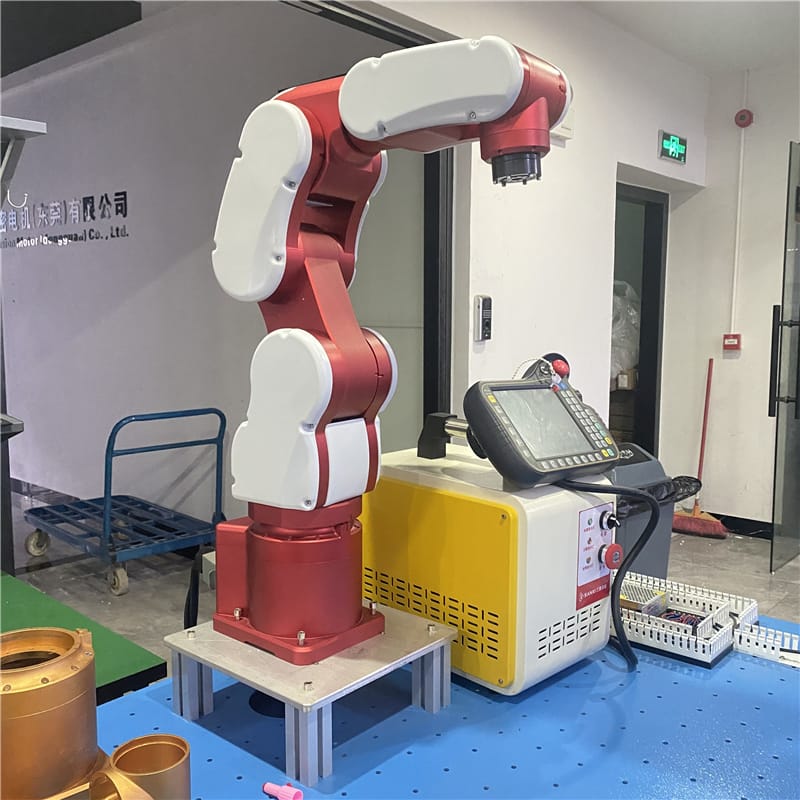




6-okly bilim ýa-da aýdyň robot ýaragy Diy Delta ýa-da kamera robot goly
Spesifikasiýa
Ok: 6
Iň köp ýük göterijisi: 4kg
Gaýtalanýan ýeri: ± 0.01mm
ulanyş çyglylygy : 20-80%
adaty gurşaw: 0 ℃ -45 ℃
Gurnama : ýer
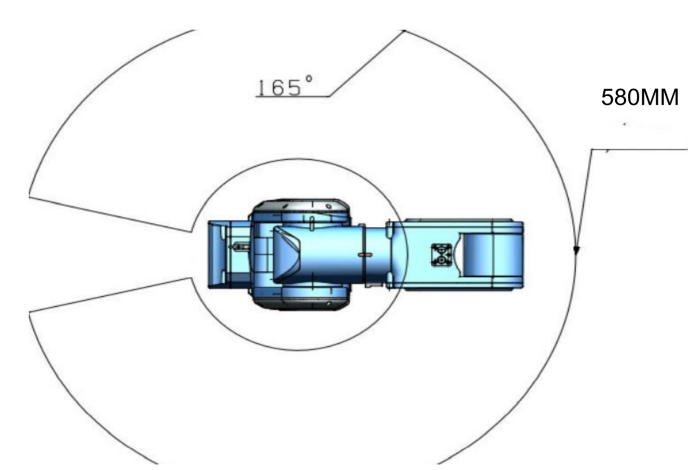
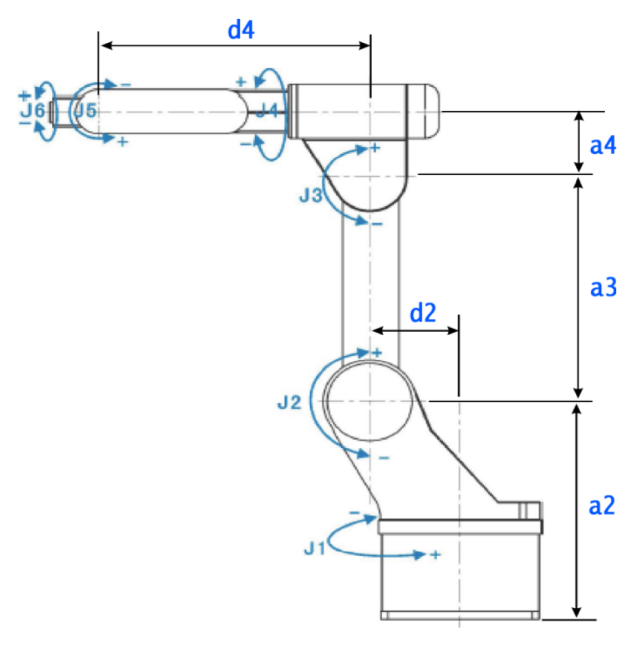
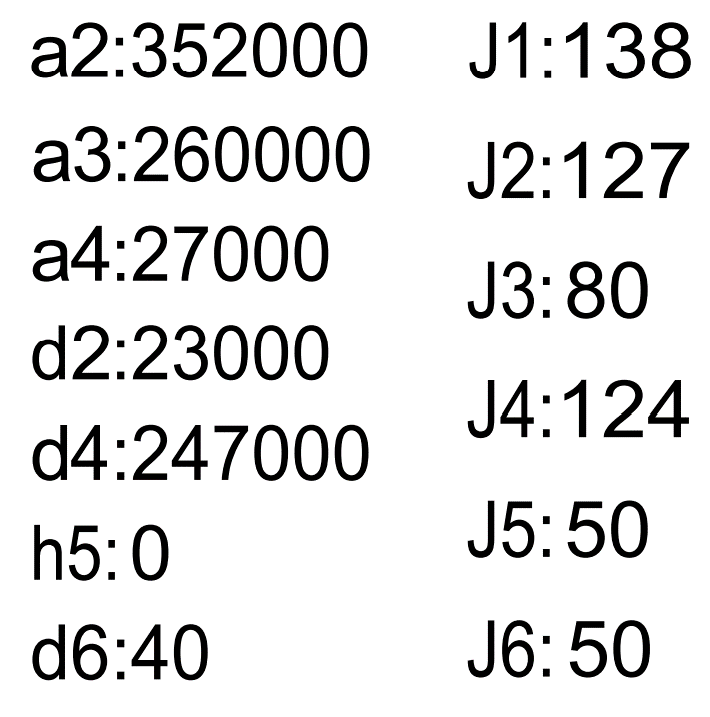
Iş aralygy: J1: ± 165 °
J2: -100 ° ~ + 120 °
J3: + 150 ° ~ -60 °
J4: ± 175 °
J5: + 130 ° ~ -30 °
J6: ± 180 °
Iň ýokary tizlik: J1: 260 ° / s
J2: 250 ° / s
J3: 250 ° / s
J4: 250 ° / s
J5: 200 ° / s
J6: 760 ° / s
iş aralygy :
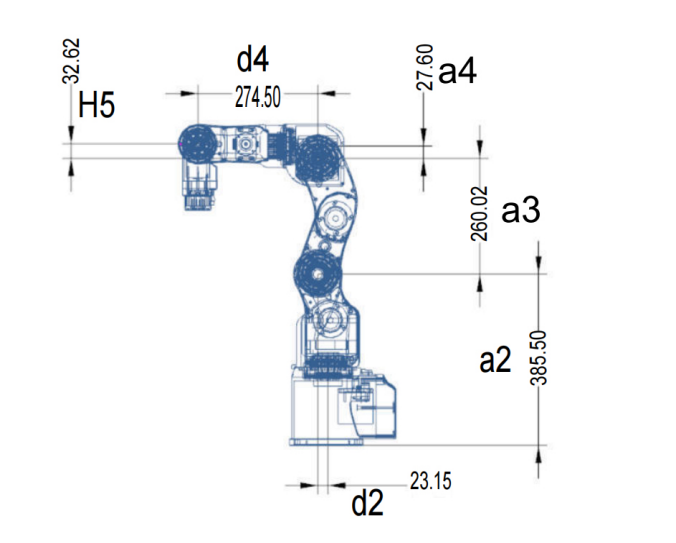
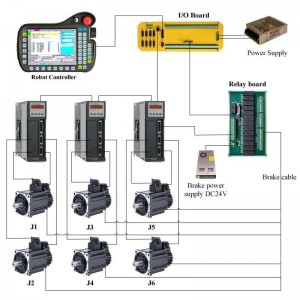
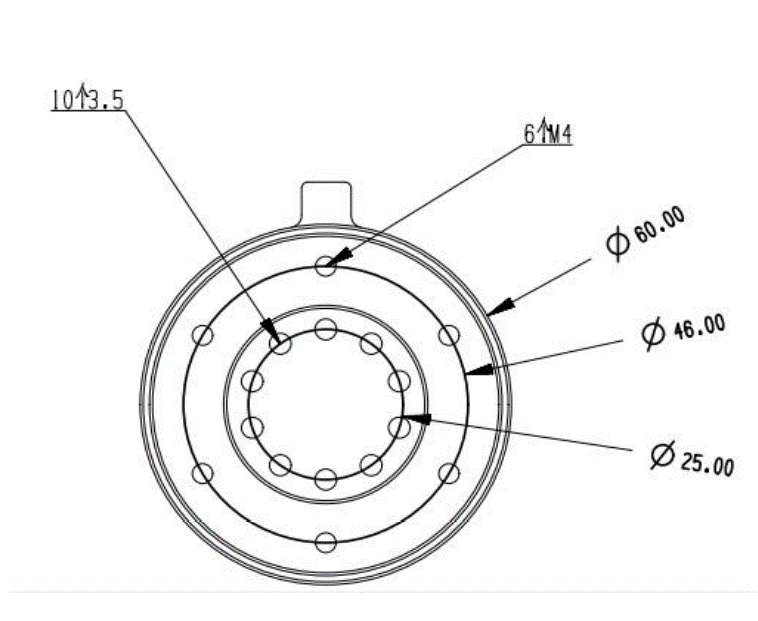
esasy gurnama:
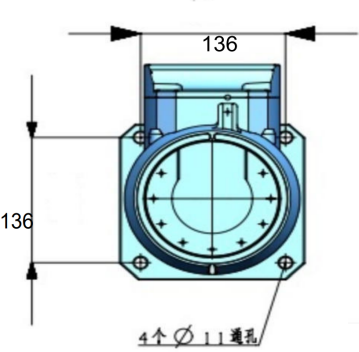
esasy gurnama:
Goýmalar
Bilim programmalary:
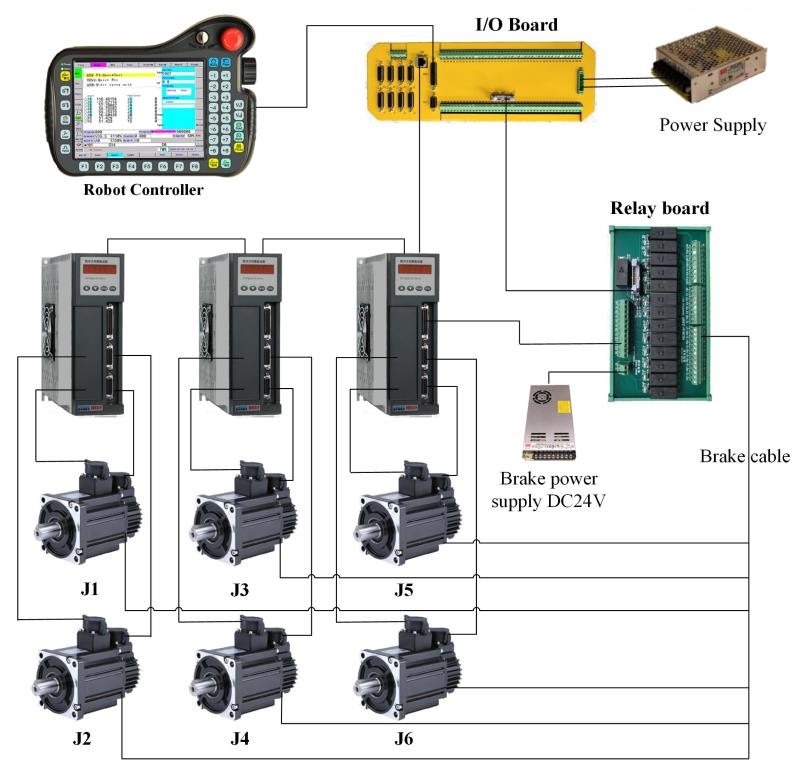
1. Robot ulgamynyň esasy düzümini öwrenmek.
2. Robotyň programmirleme we öwretmek funksiýalaryny öwrenmek üçin maýatnik öwrediň.
3. Robot awtonom programmirlemegiň esasy bilimlerini öwrenmek.
4. Robot io-nyň işleýşini we amaly programmirlemesini öwrenmek.
5. Robot wizual programmalaryny öwrenmek
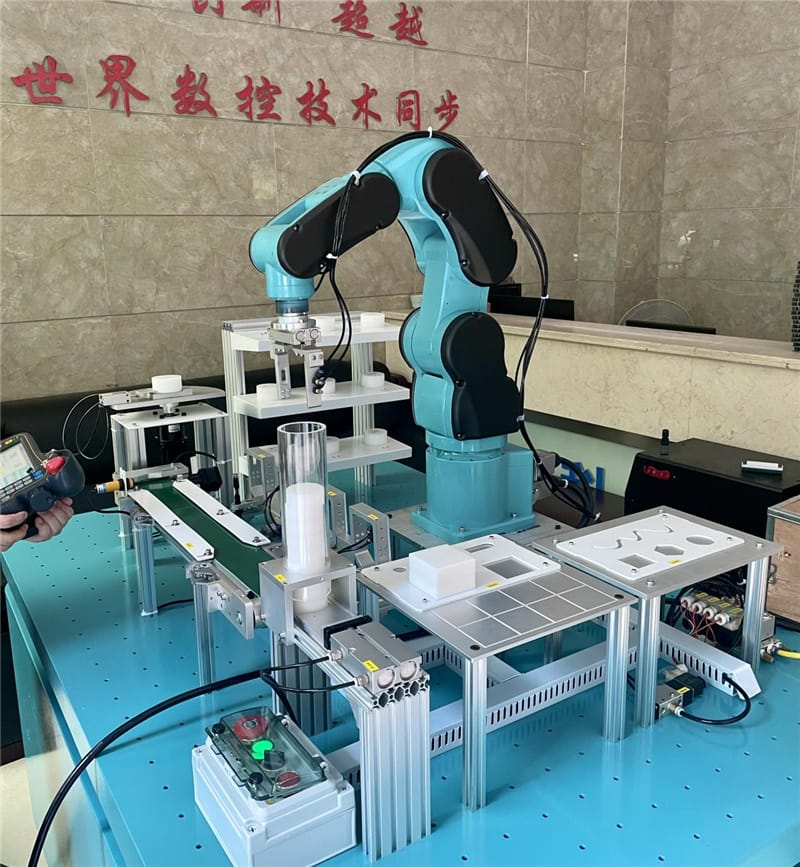
Söwda sahnalary: Robot doňdurma Robot Bartender Robot kofesi Robot süýt çaýy ýeňil senagat sahnalary: Dispensasiýa barlagyny ölçemek
Önüm aýratynlyklary
Robot gol : Robot goly CNC işleýiş merkeziniň üsti bilen alýumin guýmalardan ýasalýar we üstü plastmassa sepilýär we owadan görnüşe eýe.
Goragly kabel deşigi : Robot goly owadan we manipulýatoryň işine päsgel bermeýän kabel deşiklerini saklady. Trahaýanyň soňy port we maglumat kabel birleşdirijisi üçin saklanýar.
Dolandyryjy paneli : Uly ekranly LCD displeý, dil görkezmek usuly müşderiniň isleglerine, ýönekeý we düşnükli işleýişine we programmirlemegine, onlaýn parametrleri üýtgetmek we öz-özüni anyklamak funksiýalaryna esaslanyp bilner.
Robot dolandyryş kabineti : Akylly hereket dolandyryş ulgamy senagat kompýuter tehnologiýasyny kabul edýär we ähli sanly sero moduly robotyň her bir bogunynyň AC servo hereketlendirijileri üçin hereketlendiriji güýji üpjün edýär.
Robot enjamlary: Gural gurallary, ýöriteleşdirilen talaplara görä dürli agyrlyk güýjüni we mukdaryny saýlap biler we sazlamak aňsat we giň ulanylyşy bolan ahyrky flanesde oturdylýar.